
“It's so cute!”
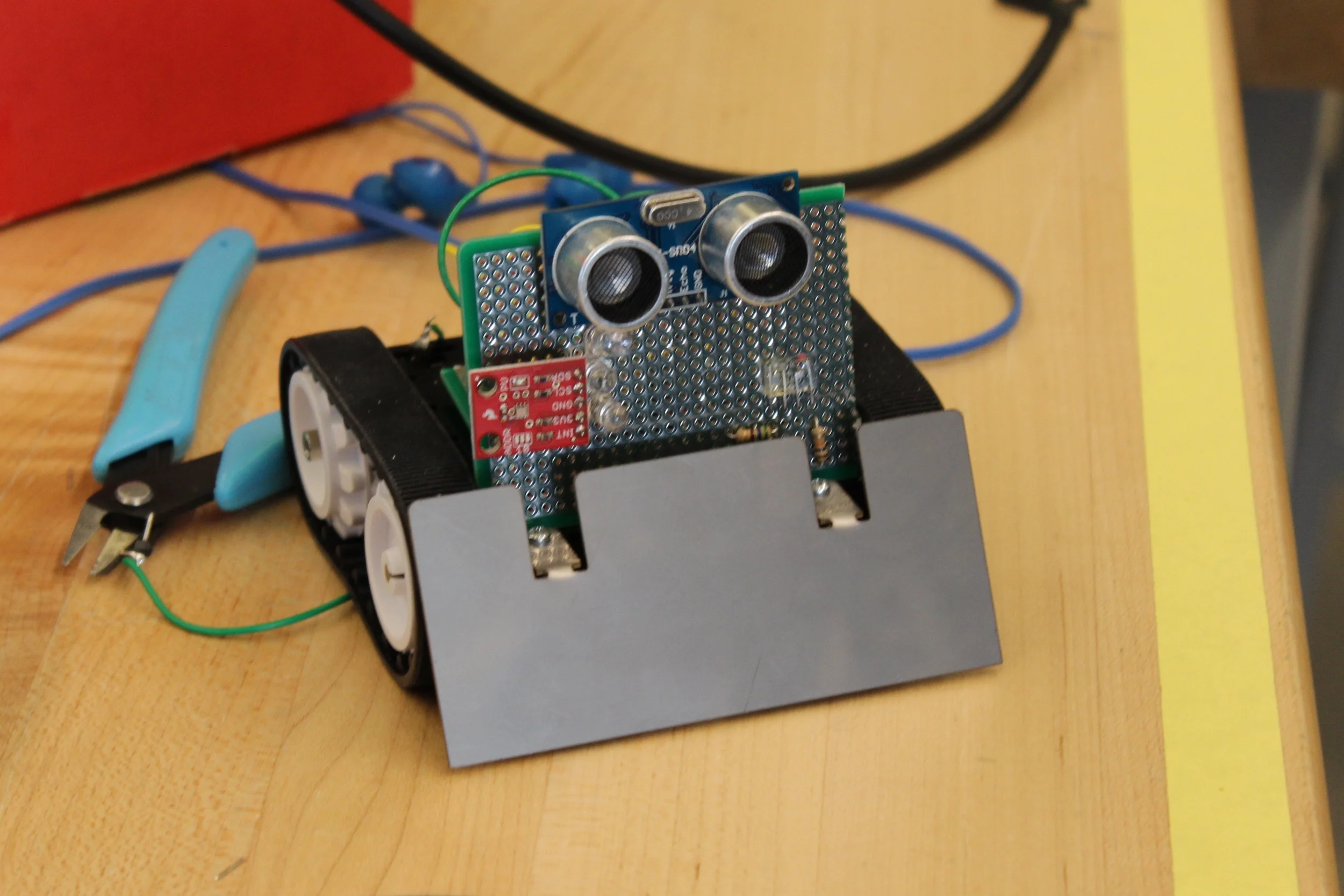
The recognizable voice came from the back of the CEID. Alex Noonan (’14) was not referring to an adorable puppy, but a tiny, treaded, soon to be robot just the right size to fight in your hand.
Alex Noonan, Sam Samuelson (’14), and Spencer Alexander (’14) are designing, programming, and constructing a swarm of twelve tiny tanks to create a cooperative robotics system. The bots will independently whizz around, using sonar, photodiodes, IR sensors, and color detection to navigate and locate a specific payload to push.

What makes this project different from many others is that these robots are not meant to be ultra smart and integrated. The group aims to create a system where each robot will act autonomously without communication with each other or a remote. The robots move around in a manner similar to ants. The insects respond to a hormone, like the bots responding to color and objects in their paths. The individual ant does not know much, but as a group, the ants can accomplish complex tasks. Similarly, the bots start with no knowledge of the arena other than that the payload is red and reflective. They do not learn and have no memory; they simply react instantaneously to conditions they see. “Intelligence arises from the system itself,” Sam says, rather than a compounding of knowledge of the surroundings.
Why not allow for memory and more intelligence, or maybe some communication between the robots? These little guys are meant to be cheap both in terms of hardware and processing so that they are usable in all different types of conditions. For example, let’s say we thought, “wouldn’t it be easier if, as soon as one robot found the payload, it could communicate its position to the others?” This sharing of information would require an antenna on each of the bots capable of communicating a directional signal. The robots would then have to navigate to the specific point communicated, and their range would be limited by the antenna. These extra steps actually make the system more complicated than if the robots searched independently.
Be careful where you step as you walk around the CEID; the team hopes to have their first official prototype by the end of next week!